Tasarlanan robotik kıskaçlardaki en büyük sorunlardan biri tutacağı nesneyi doğru şekilde kavrayamaması ve bunun sonucunda ürünü deforme etmesi ya da kırması olarak gösteriliyor. Boston Üniversitesi’nden araştırmacılar Japonların kirigami (kağıt kesme sanatı) sanatından ilham alarak geliştirdikleri çok yönlü bir robotik kıskaç ile bu kavrama sorununu çözüyor. Science Robotics’te yayınlanan makalede Boston Üniversitesi Makine Mühendisliği Bölümü Doçenti Douglas Holmes, doktora öğrencisi Yi Yang ve mühendislik mezunu Katie Vella kirigamiden ilham olarak kolu nasıl geliştirdiklerini açıklıyor.
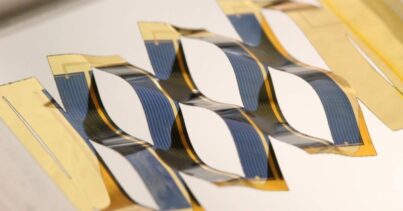
Kirigami, 17. Yüzyılda ortaya çıktığı düşünülen Japon kültürünün bir parçası olarak kabul edilen bir sanat. Origami temellerine dayanan bu sanatta belirli formlarda katlanmış kağıtlar makas ya da kesici aletler kullanılarak şekillendiriliyor. “kiru” (kesmek) ve “kami” (kağıt) kelimelerinin Japonca’daki anlamlarına bakınca katlama sanatının neden Kirigami olduğu daha net anlaşılıyor. Geliştiriciler bu fikirden ilham alarak belirli şekillerde kesilmiş plastik levhaların nasıl güvenli bir tutucu olabileceğini araştırıyor.
Our paper on "Grasping with Kirigami Shells" is out today in Science Robotics (@SciRobotics)!
This work was led by the remarkable PhD student Yi Yang (@YiYANG_yy) and stellar @BuMechE alum Katie Vella (@ktvella14.
https://t.co/mdaigHS7Jt pic.twitter.com/weqj2xA9Hr
— Douglas Holmes (@dpholmes) May 12, 2021
Boston Üniversitesi’nin geliştirdiği robotik kıskacın tuhaf şekilli hassas ürünler için ideal bir yapısı var
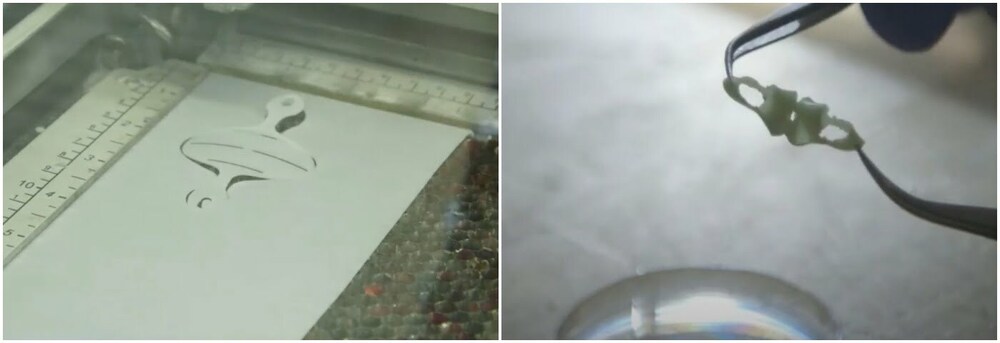
İlk olarak esnek malzeme dışardan büküldüğünde nasıl şekil değiştirdiği inceleniyor. Plastik levhalar belirli şekillerde kesilerek materyali hangi noktalardan kesmeleri gerektiği araştırılıyor. Bu kesme noktalarında en önemli adım plastiğin bükülmesi sırasında ürünü kavrayabilecek bir forma erişmesi.
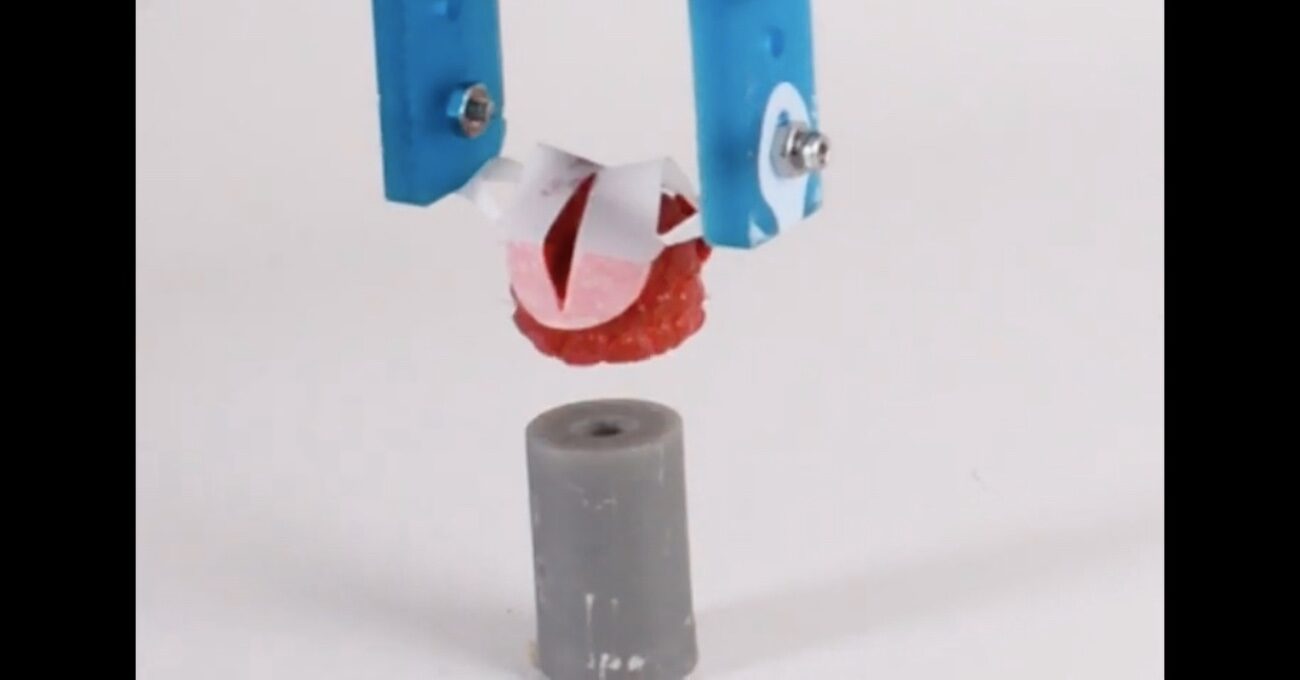
Geliştirilen teknik sonucunda ortaya çıkan robotik kıskaç, tek bir kum tanesini kavrayabilecek kadar hassas bir ayara ya da bir su şişesini tutabilecek kadar geniş bir kavrama yeteneğine sahip oluyor. Ürünü kabuk gibi çepeçevre sarabilen esnek malzemenin her iki ucu yeterli kuvvetle çekildiğinde kıskaçlar ürünü kapıyor ve taşıyabiliyor.
Videoda da görüleceği üzere robotik tutucunun gıda sektöründe kullanılması oldukça olası gözüküyor. Tabii bu noktada en önemli sorun robotik kavrayıcıların hassasiyet becerisi. Kollar bir nesneyi kaldırırken ne kadar baskı uygulayacağını doğru hesaplaması gerekiyor. Böğürtlen gibi oldukça hassas meyvelerin toplanmasında ya da yumurta gibi kavraması kolay ama kırılma tehlikesi olan ürünlerin endüstriyel ambalajlama sürecinde oldukça işlevsel olabilir.
Özellikle paketleme alanında kullanılmak üzere düzensiz ve tuhaf şekilli nesneleri kavramak için tasarlanan robotik kollar üzerine oldukça fazla araştırma ve deneme yapılıyor. Soft Robotics’in nesneleri kavramaya yönelik geliştirdiği insan eli gibi davranan lastik uçlu uzantılar, MIT ve Harvard Üniversitesi’ndeki araştırmacılar tarafından geliştirilen origamiden ilham alan sinek kapanı bitkisi benzeri tutucu da bu örnekler arasında bulunuyor.
Görsel: YouTube