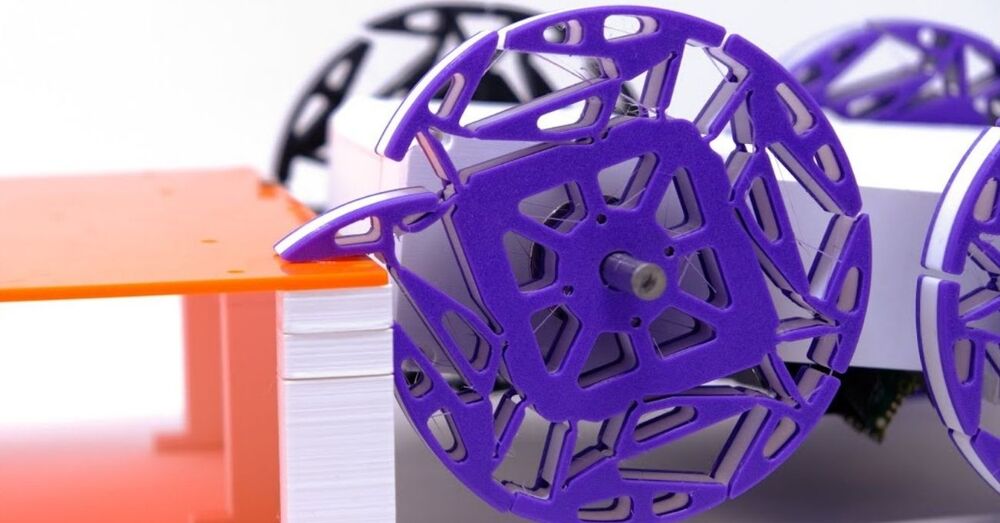
Mobil robot navigasyonu için geliştirilen “PaTS-Wheel”, pasif olarak biçim değiştirebilen/dönüşebilen tek parçalı bir tekerlek. Çoğu mobil robotta, fabrika ve depo gibi düz ve yapılandırılmış zeminlerde iyi performans gösteren tekerlekler kullanılıyor. Ancak bu tekerlekler, basamak gibi zorlu engelleri aşmada ve yapılandırılmamış zorlu arazilerdeki navigasyonlarda sorunlar yaratıyor. PaTS-Wheel ise videoda da görebileceğiniz üzere engellerle karşılaştığında kendiliğinden kancalaşan yapısıyla pasif olarak biçim değiştirebiliyor. Pasif değişimi, tamamen engelin geometrisine uyumlanmasını sağlayan ve morfolojik açıdan olumlu olan bir özellik. Bu yapısı nedeniyle ismi Passively-Transformable Single-part Wheel/PaTS-Wheel (Pasif Olarak Dönüşebilen Tek Parça Tekerlek).
Engelleri aşmada, standart tekerleklerden ve bacaklı tekerleklerden çok daha yüksek başarı oranına sahip
Tekerlek, Imperial College London’daki Dyson School of Design Engineering araştırmacılarının imzasını taşıyor. Bu araştırmacı ekibin isimleri şöyle: Thomas Godden, Barry W. Mulvey, Ellen Redgrave, Thrishantha Nanayakkara. Ekip, PaTS-Wheel’in tasarımını ve testlerini anlatan bir bilimsel makaleyle araştırmalarını duyurmuş. Thomas Godden ise prototipin aşağıdaki videosunu paylaşmış.
One of the projects I worked on @ImperialDyson / @thrishlab is getting published! We designed a print-in-place compliant wheel that passively transforms when encountering obstacles.
Video with more details: https://t.co/xaIDdSNGLW
Early access paper: https://t.co/AQChRLvAzo pic.twitter.com/rpiT436Yz5
— Thomas Godden (@GoddenThomas) April 28, 2024
PaTS-Wheel’ın düz zemindeki enerji tüketimi ve titreşim profili, aynı boyuttaki standart bir tekerlekten pek de farklı değil. Bu yenilikçi tekerlek tasarımı, farklı yükseklikte basamaklı engellerle farklı arazilerde test edilmiş. Tekerlek çapının ≈%70’i kadar yüksekliğe sahip basamaklı engelleri geçmede %100 ~ başarı oranı elde etmiş. Bu başarının, kendisine eşdeğer standart tekerleklerle ve robotlarda kullanılan bir tür bacaklı tekerlek olan wheg’lerle kıyaslandığında çok daha yüksek olduğu ortaya konulmuş. Çap olarak kendisine eşdeğer sayılabilecek standart bir tekerlekte bu %100’lük başarı ancak çapının ≈%25’i kadar engellerde görülüyor. Yine eşdeğer wheg’lerde çapının ≈%61’i engeller için bu başarı söz konusu.
Ayrıca tekerleğin, “yerinde baskı uyumlu” olduğu belirtilmiş. Yerinde baskı 3B modeller, tek bir baskıyla hareketli bir parça oluşturulabilen modeller.
PaTS-Wheel’i tasarlarken hedef; herhangi bir sensöre, aktüatöre veya kontrol cihazına ihtiyaç duymadan, tekerleklerin enerji verimliliğini ve sürüş düzgünlüğünü robotların engelleri aşma yetenekleriyle birleştirmekmiş. Tasarımın bu hedefe ulaştığı görülüyor.
Görsel: YouTube






